パフォーマンス最適化
このページでは、LinuxベースのCODESYS Control SL製品をデバイスとアプリケーション用に設定して、可能な限り最高のパフォーマンスを実現する方法を紹介します。
システムの現在のステータスを確認および評価するために使用できるツールを提供します。
以下の手順をお勧めします。これらの手順を指定された順序で実行してください。現在のステップが必要なほど最適化されていない場合、次のステップに進むのは意味がありません。
重要
各ステップの後、最後の変更が前のステップの最適化に悪影響を及ぼしていないことを確認します。
通常の負荷で望ましいパフォーマンスを達成した後、オプションで高負荷でのテストを実行できます。 stress-ng または iperf。
ハードウェアのチェック
コントローラーのプロセッサ コアには共有キャッシュを使用しないでください。
ターゲットデバイスにイーサネットベースのフィールドバスを使用している場合は、物理アダプターを使用してください。スイッチアーキテクチャは使用しないでください
Linuxのセットアップ
リアルタイム カーネルを使用します。
リアルタイムでの要求には、RT プリエンプトカーネルを使用する必要があります (https://wiki.linuxfoundation.org/realtime/documentation/start) お使いの Linux システム用。Debian ディストリビューションと Ubuntu ディストリビューションの場合は、RT カーネルがパッケージとして用意されており、次のコマンドを使用して簡単にインストールできます
aptコマンド。これについての詳細は、お使いのディストリビューションのマニュアルを参照してください。Debian システムの場合
sudo apt-get install linux-image-rt-amd64使用しているカーネルを確認してください
uname -a指示。例えば。
システム上でウィンドウ マネージャー、GUI/X サーバー、または類似のものを使用することは避けてください。
これらのツールを使用すると、システムのリアルタイム機能に影響を及ぼし、IEC アプリケーションで高いジッターが発生する可能性があります。
テスト
「rt-tools」の使用:
「rt-tools」のインストール:
sudo apt install rt-tests「cyclictest」を開始します。
sudo cyclictest -p 99 -t -mの
man cyclictestコマンドでは、システムのより詳細な、または特定のパフォーマンス側面をより適切に測定するために使用できる、より多くのコマンド ライン オプションが表示されます。
で決まる値の有無 cyclictest ハードウェアによっては「良好」と見なすことができます。非常に強力なプロセッサー (Intel Core i7 など) を使用している場合は、最大で 1 桁の数字を小さくする必要があります。古い ARM プロセッサを使用している場合は、100 が適切な結果になる可能性があります
最適化オプション
重要
各設定または設定の組み合わせを変更したら、次のコマンドを実行する必要があります。 cyclictest 変更の有効性を検証するプログラム。
これらの設定は永続的ではないため、システムの起動または再起動後にリセットする必要があります。
注記
バージョン 4.21.0.0 以降では、 CODESYS 、これらの値のほとんどを直接出力する PLC シェルコマンドが用意されています。そのためには、以下を実行します。 system-creatertreport コマンド。コマンドの詳細については、以下を実行してください system-creatertreport ?。
CPU の省エネモードを無効にします。
ハイパースレッディングを無効にします。
次のコマンドを使用してハイパースレッディングを無効にできます (例)。
echo off | sudo tee /sys/devices/system/cpu/smt/controlCPU 周波数のスケーリングと切り替えを可能な限り無効にします。
たとえば、CPU 周波数の最小値と最大値を同じ (固定) 値に設定します。
Linux カーネルのリアルタイムスロットリングメカニズムを無効にしてください。これにより、システムにジッターが発生する可能性があります。
詳細については、以下を参照してください。 Linux の基礎:スケジューリング — RT スロットリング
次のコマンドを使用してリアルタイムスロットリングを無効にできます (例)。
echo -1 > /proc/sys/kernel/sched_rt_runtime_usスケジューリング/スケーリングガバナーを確認および変更します。
使用されているスケジューリング/スケーリング ガバナーを確認します。
cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
使用するスケジューリング/スケーリングガバナーを変更します(
root/admin) にPerformance:echo "performance" > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor # set it for all available cores: echo "performance" > /sys/devices/system/cpu/cpu1/cpufreq/scaling_governor echo "performance" > /sys/devices/system/cpu/cpu2/cpufreq/scaling_governor echo "performance" > /sys/devices/system/cpu/cpu3/cpufreq/scaling_governor
システムを起動するたびにスケーリング ガバナをリセットする必要があることに注意してください。カーネル構成を使用して設定することもできます。
の
intel_pstateカーネルドライバーにより、正しい設定がより困難になる場合があります。したがって、次を使用する必要があります。cpufreq-infoコマンドを使用して構成を確認します。次のようなプログラムも使用できます。
cpu-freq-utils。これにより、Intel psstate ドライバーが妨害される可能性があります。これらのドライバーは通常、CPU 周波数を設定するために別のアプローチを必要とします。詳細については、以下を参照してください。 https://www.kernel.org/doc/Documentation/cpu-freq/governors.txt
無効にする
HyperVBIOS 内 (利用可能な場合)。
CODESYS ランタイム システムの構成
システムを最適化するアプリケーションを大まかに説明するテスト アプリケーションを作成します (必要なリソース、必要なパフォーマンス、プロジェクト サイズの観点から)。
これを繰り返し行うことができます。最初に非常に大まかな近似を作成し、それを拡張して実際のアプリケーションにどんどん近づけます。
テスト
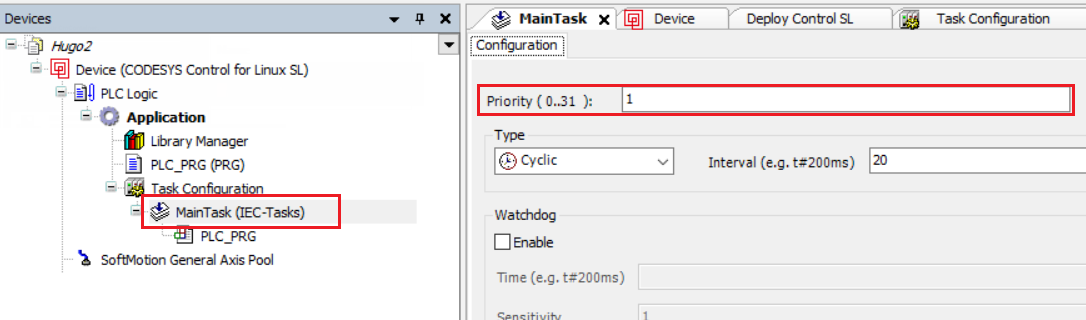
アプリケーションの実行中に、タスクの構成を確認します。を開きます。 タスクの構成 そして、 モニター タブ。

分。ジッタ (μs) / 最大ジッター (μs)
値は、「cycletest」プログラムによって決定された値にできるだけ近い必要があります。詳細はセクションで説明されています Linuxのセットアップ。
ジッターと遅延の詳細については、以下を参照してください。 ジッターとレイテンシーの定義
[監視] タブの詳細については、次を参照してください。 タブ: モニタリング
平均サイクル時間 (μs) / 最大サイクルタイム (μs) サイクルタイム (μs)
最大サイクルは、設定されたサイクル タイムに決して近づいてはなりません。これにより、システムに高負荷がかかるとすぐに問題が発生します。
サイクルタイムは常にできるだけ短くしてください。
最適化オプション
重要
各設定または設定の組み合わせを変更したら、次のコマンドを実行する必要があります。 cyclictest 変更の有効性を検証するプログラム。
長時間実行されるタスクを複数の小さなタスクに分割します。
実行中、最も優先度の高いタスクの最大サイクル タイムは、設定されたサイクル タイムに決して達してはなりません。これを回避できない場合は、設定されたサイクル タイムを増やして、一貫した実行時間を確保する必要があります。
フィールドバス システム (EtherCAT や PROFINET など) を開始する場合、開始サイクルにより CPU 負荷がわずかに高くなる可能性があります。この場合、アプリケーションの起動直後に CPU 負荷を監視することが合理的です。
次のオプションは変更できません CODESYS Virtual Control SLただし、ホスト上で構成する必要があります。
の値を設定します
DisableCpuDmaLatency1に:[SysCpuHandling] Linux.DisableCpuDmaLatency=1
これはランタイム バージョン 4.11.0.0 のデフォルト設定であることに注意してください。
ランタイムのバージョンを確認するには、 エクストラ → Linuxをアップデートする → システム → システム情報。
本当にリアルタイムカーネルが使用されているか確認してください。
バージョン 4.11.0.0 では、PLC シェル コマンドを使用できます。
rt-get kernelinfoこれを確認するために。古いバージョンを使用している場合は、コマンドラインでこれを直接テストできます。
uname -aコマンド。リアルタイムカーネルを使用していない場合は、最適化を最初から開始する必要があります。
IEC アプリケーションの構成
このセクションでは、実際のアプリケーションについて説明します。
テスト
前のステップのテストを使用できます CODESYS ランタイム システムの構成 IEC アプリケーションをテストします。
最適化オプション
重要
各設定または設定の組み合わせを変更した後、「cyclictest」プログラムを実行して変更の有効性を確認する必要があります。
使用できます マルチコア の特徴 CODESYS。
タスクの正しい優先順位を決定します。重要なタスクは優先順位を高くする必要があります。
表 6. IEC タスクの優先順位と Linux スレッドの優先順位のマッピング:IEC タスクの優先順位
ランタイム優先度
Linuxの優先順位
--
0
88 (SCHED_FIFO)
--
31
57 (SCHED_FIFO)
0 (リアルタイム優先度が最も高い)
32
56 (SCHED_FIFO)
15 (リアルタイム優先度が最も低い)
47
41 (SCHED_FIFO)
16 (リアルタイム優先ではない)
48
0 (SCHED_OTHER)
31 (リアルタイム優先ではない)
63
0 (SCHED_OTHER)
--
64
0 (SCHED_OTHER)
--
255
(SCHEDLE)
注記
従来の Linux システムでは、ほとんどの割り込み (IRQ) とカーネルワーカーは Linux の優先度が 50 です。それを上回る優先順位 (高負荷) を使用すると、システム機能 (ネットワーク/ストレージ) が期待どおりに動作しなくなる可能性があります
タスクの優先度は、それぞれのタスク設定で設定できます。
ここで説明したすべての手順を実行しても望ましいパフォーマンスが得られない場合は、次のセクションを参照してください。
フィールドバス固有の情報
テスト
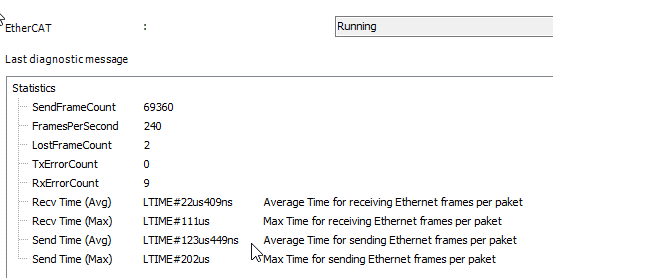
チェックしてください
Send Time/Recv TimeEtherCAT ステータス ページの値。Intel Core i7 プロセッサを搭載した x64 CPU と適切なアダプタでは、10µs 未満になるはずです。
チップが統合された ARM プロセッサでは、最大 50µs 以上の時間がかかります。
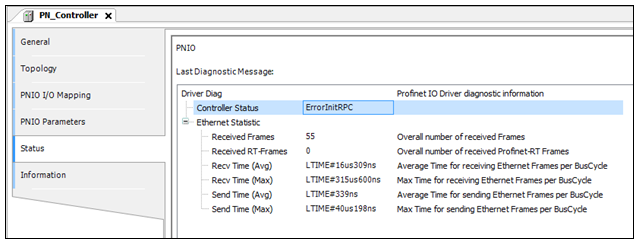
チェックしてください
Send Time/Recv TimePROFINET ステータス ページの値。Intel Core i7 プロセッサを搭載した x64 CPU と適切なアダプタでは、10µs 未満になるはずです。
チップが統合された ARM プロセッサでは、最大 50µs 以上の時間がかかります。
最適化オプション
優先順位と必要な IRQ を並べ替えるには、PLC シェル コマンドを使用できます。
irq-listそしてirq-set-prio。これらのコマンドは、IEC 優先順位ではなく、通常の Linux 優先順位を使用します。
この最適化は次の場合には実行できません。 CODESYS Virtual Control SL、むしろホストシステム上で。
デバイスには別のネットワーク アダプターを使用してください。
詳細については、以下を参照してください。
[専門家向け] – 追加のツールとトピック
このセクションで説明するツールとオプションは上級ユーザーのみを対象としており、取るべき対策は問題のシステムに大きく依存するため、独自の調査が必要です。したがって、当社では具体的な解決策を提供することはできません。
KernelShark / カーネル トレース
これは、パフォーマンスの問題の原因がスケジュールにあることが判明した場合に最適なプログラムです。 「カーネル トレース」を使用すると、タスクが別のタスク、別のサービス、または割り込みによって中断されているかどうかを確認できます。
trace-cmd record -p functionKernelShark を使用して、生成された
trace.datファイル。
一般に、スケジュールの問題は次の 2 つのカテゴリに分類できます。
スーパーセッション/プリエンプション
実行を妨げる割り込みやタスクが不要な場合は、割り込みを禁止してください。
自分のタスクの優先度を上げるか、他のタスクの優先度を下げます。
別の CPU コアに切り替えます。
重要
前の章で説明したプログラムを使用して、変更の有効性を確認します。
実行時間
以下の「カーネル関数トレース」を参照してください。
カーネル関数トレース
コードの実行時間が長すぎると判断した場合は、このツールを使用して問題を特定できます。
実行時間が長すぎる関数が独自のコードにある場合は、それを最適化する必要があります。
実行時間が長すぎる関数がカーネル内にある場合は、別のカーネル関数を使用して目的の機能の実現を試みることができます。あるいは、実行時間を短縮するために、カーネル ドライバーに構成パラメーターを渡すこともできます。
これらのオプションのいずれも問題を解決しない場合は、おそらく、より強力なハードウェアを使用する必要があります。
次の点に注目して、それらがパフォーマンス目標を達成するための正しいツールであるかどうかを確認してください。
PREEMPT_FULL
isolcpu
rcu_nocbs
rcu_nocb_poll
ソフトロックアップなし
irqbalance の無効化
kernel.sched_rt_runtime_us